Title
题目
Rapid whole brain motion-robust mesoscale in-vivo MR imaging usingmulti-scale implicit neural representation
基于多尺度隐式神经表征的快速全脑运动鲁棒中尺度在体磁共振成像
01
文献速递介绍
磁共振成像(MRI)是一种广泛应用于科学研究的无创成像技术。MRI的空间分辨率直接决定了解剖细节的清晰度和诊断结果的准确性。然而,实现中尺度分辨率往往需要以降低信噪比(SNR)和延长采集时间为代价,这给当前研究带来了重大挑战(Sui等人,2020)。平衡分辨率、信噪比和采集效率仍是MRI技术发展的核心问题(Plenge等人,2012)。 为应对这一权衡问题,通常会采集平面内分辨率相对较高而层面间分辨率较低的MRI图像(Zhao等人,2020)。在二维MRI中,层面间方向始终由切片选择方向定义;而在三维MRI中,层面间方向通常是第二个相位编码方向,该方向的k空间采样宽度通常最小。尽管各向异性体素采集在平面内方向可生成诊断可接受的图像,但对于需要空间各向同性体素的研究应用而言并不适用。 为解决这一局限性,超分辨率重建(SRR)技术被提出,旨在从各向异性或多视角低分辨率(LR)采集数据中恢复各向同性高分辨率(HR)图像。基于学习的方法已展现出巨大潜力,包括单图像和多图像超分辨率方法。然而,这些模型通常依赖大规模配对高分辨率-低分辨率数据集进行有监督训练,而中尺度分辨率下的此类数据集极为稀缺。此外,当应用于训练分布外的数据(如不同对比度、解剖结构或病理病例)时,其性能往往会下降。 另一种方案是多视角超分辨率重建策略,通过融合从多个方向采集的厚切片图像来重建高分辨率体数据。尽管这些方法可缓解数据依赖性问题,但大多数现有方法依赖简单的重建模型(如最小二乘拟合),难以保留高频细节,也无法适应采集过程中的受检者运动。 近年来,隐式神经表征(INR)已成为一种强大的自监督框架,用于建模连续信号。通过学习从空间坐标到信号强度的映射,INR无需依赖外部标记数据集,即可直接从采样数据中表征高分辨率图像体数据(Sitzmann等人,2020)。此外,INR的自监督特性使整个框架能够适应多种成像场景,无需特定任务的标注数据集,尽管仍需为每个新受检者重新训练INR。然而,标准INR架构由于内存和计算需求较高,在处理大型体数据时扩展性较差。多分辨率哈希编码等最新进展(Müller等人,2022)通过将坐标嵌入紧凑的层级结构中解决了这一问题,能够高效建模精细细节和全局上下文。 在本研究中,我们提出了ROVER-MRI,这是一种新型隐式神经表征框架,专为基于旋转厚切片采集的中尺度MRI超分辨率重建量身设计。我们的贡献总结如下: 1. 开发了一种多尺度INR方法,能够从多视角(旋转)厚切片MRI图像中学习连续的图像重建。随后对该连续模型进行采样,生成单一的高各向同性分辨率MRI图像体数据。值得注意的是,这是首次在医学成像领域将INR专门用于表征此类高分辨率数据(空间维度超过1000个体素的体数据)。 2. 在可获取真实标签数据的125微米猕猴离体脑数据上验证了该方法的性能,并与当前最先进的多视角重建方法(即最小二乘超分辨率重建(LS-SRR))进行了定量比较(Vis等人,2021;Dong等人,2024)。 3. 证实了该方法在稀疏视角下的优异性能,从而可将扫描时间缩短一半。在多个具有挑战性的人类在体数据集上验证了该方法的性能,尤其实现了迄今为止最高分辨率的人类全脑在体T2加权成像——在17分钟内获得180微米各向同性分辨率图像。 4. 在重建框架中融入了运动校正模块,并在模拟及真实头部运动(扫描仪内)场景下,证实了该方法恢复细节的有效性。 5. 最后,我们表明,在扫描时间匹配的梯度回波(GRE)扫描中,ROVER-MRI能够实现比三维采集更高的空间分辨率和信噪比。
Aastract
摘要
High-resolution whole-brain in vivo MR imaging at mesoscale resolutions remains challenging due to longscan durations, motion artifacts, and limited signal-to-noise ratio (SNR). While acquiring multiple anisotropicscans from rotated slice orientations offers a practical compromise, reconstructing accurate isotropic volumesfrom such inputs remains non-trivial due to the lack of high-resolution ground truth and the presence ofinter-scan motion. To address these challenges, we proposes Rotating-view super-resolution (ROVER)-MRI,an unsupervised framework based on multi-scale implicit neural representations (INR), enabling accuraterecovery of fine anatomical details from multi-view thick-slice acquisitions. ROVER-MRI employs coordinatebased neural networks to implicitly and continuously encode image structures at multiple spatial scales,simultaneously modeling anatomical continuity and correcting inter-view motion through an integratedregistration mechanism. Validation on ex-vivo monkey brain data and multiple in-vivo human datasetsdemonstrates substantially improved reconstruction performance compared to bi-cubic interpolation and stateof-the-art regularized least-squares super-resolution reconstruction (LS-SRR) with 2-fold reduction in scan time.Notably, ROVER-MRI enables whole-brain in-vivo T2-weighted imaging at 180 μm isotropic resolution injust 17 min on a 7T scanner, achieving a 22.4% reduction in relative error compared to LS-SRR. We alsodemonstrate improved SNR using ROVER-MRI compared to a time-matched 3D GRE acquisition. Quantitativeresults on several datasets demonstrate better sharpness of the reconstructed images with ROVER-MRI fordifferent super-resolution factors (5 to 11). These findings highlight ROVER-MRI’s potential as a rapid, accurate,and motion-resilient mesoscale imaging solution, promising substantial advantages for neuroimaging studies.
中尺度分辨率的高分辨率全脑在体磁共振成像仍面临挑战,主要受制于扫描时间长、运动伪影以及信噪比(SNR)有限等问题。尽管从旋转切片方向获取多个各向异性扫描是一种实用的折中方案,但由于缺乏高分辨率真实标签且存在扫描间运动,从这类输入中重建精确的各向同性体数据仍然具有挑战性。为解决这些问题,我们提出了旋转视角超分辨率(ROVER)-磁共振成像技术,这是一种基于多尺度隐式神经表征(INR)的无监督框架,能够从多视角厚切片采集数据中精确恢复精细的解剖学细节。ROVER-MRI采用基于坐标的神经网络,在多个空间尺度上隐式且连续地编码图像结构,同时通过集成配准机制对解剖学连续性进行建模并校正视角间运动。在猕猴离体脑数据和多组人类在体数据集上的验证结果表明,与双三次插值和最先进的正则化最小二乘超分辨率重建(LS-SRR)相比,该方法的重建性能显著提升,且扫描时间缩短了一半。值得注意的是,ROVER-MRI在7T扫描仪上仅需17分钟即可实现180微米各向同性分辨率的全脑在体T2加权成像,与LS-SRR相比,相对误差降低了22.4%。我们还证实,与扫描时间匹配的3D梯度回波(GRE)采集相比,ROVER-MRI能获得更高的信噪比。在多个数据集上的定量结果显示,对于不同的超分辨率倍数(5至11倍),ROVER-MRI重建的图像具有更优的锐度。这些研究结果表明,ROVER-MRI有望成为一种快速、精确且抗运动干扰的中尺度成像解决方案,为神经影像学研究带来显著优势。
Method
方法
3.1. Acquisition strategy
To achieve super-resolution reconstruction, multiple low-resolutiondatasets are combined to achieve high isotropic resolution. In thisstudy, as depicted in Fig. 1(A), we acquired thick-slice images (buthigh in-plane resolution) by systematically rotating the acquisitionaround the phase-encoding axis, following the multi-stack rotationalacquisition method introduced by Shilling et al. (2008). The theoreticalminimum number of rotations (*𝑁𝑅*) required to reconstruct isotropicvoxel resolution is determined based on the geometric framework forsuper-resolution reconstruction developed by Plenge et al. (2012), asexpressed in the following equation:𝑁𝑅* ≥𝜋2where 𝛼 represents the ratio of the longer to shorter dimensions of avoxel. Additionally, as noted by Edelstein et al. (1986), the SNR inmulti-slice imaging is strongly influenced by voxel volume, with largervoxels typically providing enhanced SNR.The generation of a low-resolution image (𝐋𝐑*𝑣* ) from a highresolution image (𝐲) can be described mathematically as follows:𝐋𝐑𝑣 = 𝐇𝑣𝐲 + 𝐧𝑣, (2)where 𝑣 denotes a specific low-resolution sample, while 𝐧𝑣 is random Gaussian vector modeling the measurement noise. The matrix𝐇*𝑣* encapsulates the cumulative effects of geometric transformations,resolution downsampling, and blurring applied to the high-resolutioninput. This matrix is influenced by factors such as image dimensions,anisotropic voxel sizes, and the slice profile, which is modeled in thisstudy using a rectangular function.
3.1 采集策略 为实现超分辨率重建,需融合多个低分辨率数据集以获得高各向同性分辨率。本研究中,如图1(A)所示,我们采用Shilling等人(2008)提出的多堆叠旋转采集方法,通过围绕相位编码轴系统性旋转采集方向,获取平面内分辨率高的厚切片图像。 重建各向同性体素分辨率所需的理论最小旋转次数(\(N_R\)),基于Plenge等人(2012)提出的超分辨率重建几何框架确定,公式如下: \[N_R \geq \frac{\pi}{2\alpha}\] 其中\(\alpha\)表示体素长轴与短轴的尺寸比。此外,正如Edelstein等人(1986)所指出的,多切片成像中的信噪比(SNR)受体素体积影响显著,体素越大通常信噪比越高。 从高分辨率图像(\(\mathbf{y}\))生成低分辨率图像(\(\mathbf{LR}v\))的数学描述如下: \[\mathbf{LR}v = \mathbf{H}v\mathbf{y} + \mathbf{n}v \tag{2}\] 其中\(v\)代表特定低分辨率样本,\(\mathbf{n}v\)是模拟测量噪声的随机高斯向量。矩阵\(\mathbf{H}v\)涵盖了施加于高分辨率输入的几何变换、分辨率下采样及模糊效应的累积影响。该矩阵受图像尺寸、各向异性体素大小以及切片轮廓等因素影响,本研究中切片轮廓采用矩形函数建模。
Conclusion
结论
In summary, our results demonstrate that ROVER-MRI enablesrapid, high-SNR whole-brain imaging at isotropic resolution, offering asignificant advancement over existing mesoscale MR imaging methods,especially for T2w images. By integrating multi-view acquisitions withmulti-resolution hash encoding, our approach achieves high-qualitysuper-resolution reconstruction while remaining robust to noise andmotion. These capabilities make ROVER-MRI well-suited for mesoscaleneuroimaging studies and hold great potential for applications requiring time-efficient, high-resolution whole-brain imaging. Future workwill explore strategies to accelerate model adaptation, such as reusingnetwork components across subjects with matched acquisition parameters and incorporating meta-learned initialization techniques to enablefaster convergence.
总之,我们的研究结果表明,ROVER-MRI能够实现快速、高信噪比的全脑各向同性分辨率成像,相比现有中尺度磁共振成像方法取得了显著进步,尤其适用于T2加权图像。通过将多视角采集与多分辨率哈希编码相结合,我们的方法实现了高质量超分辨率重建,同时对噪声和运动具有较强的鲁棒性。这些特性使ROVER-MRI非常适合中尺度神经影像学研究,并在需要高效、高分辨率全脑成像的应用场景中具有巨大潜力。未来的研究将探索加速模型适配的策略,例如在采集参数匹配的情况下跨受检者复用网络组件,以及融入元学习初始化技术以实现更快收敛。
Results
结果
4.1. Experiment 1: Validation on ex-vivo monkey MRI with known ground
truthWe first validated our proposed method on ex-vivo monkey T2-weighted MRI data, where ground truth is available, providing a reliable basis for quantitative and qualitative comparisons. Fig. 2 illustrates the reconstruction results using bicubic, LS-SRR and our proposed ROVER-MRI method, highlighting the differences in performanceacross methods. The bicubic interpolation method exhibits pronouncedblurring of fine cerebellar structures and brain tissue boundaries, asevident in the magnified regions (yellow boxes). The LS-SRR methodimproves sharpness but introduces noticeable streaking artifacts, compromising reconstruction quality. Additionally, the error maps showthat the LS-SRR method struggles to preserve fine structural boundaries(see red and green boxes in Fig. 2). While LS-SRR performs better thanbicubic interpolation, these artifacts and errors limit its effectiveness inpreserving anatomical accuracyIn contrast, ROVER-MRI demonstrates superior performance byminimizing residual errors and effectively restoring fine details withhigh fidelity. Quantitative sharpness evaluation, measured by Laplacianvariance within the two yellow-boxed regions shows higher sharpnessusing ROVER-MRI method (0.0105 and 0.0123) compared to LS-SRR(0.0089 and 0.0104), underscoring its superior capability in preservingfine anatomical details.Table 2 summarizes the Relative Error (RE) comparisons for different MRI reconstruction methods (LS-SRR and ROVER-MRI) acrossvarious imaging scenarios. The results demonstrate that ROVER-MRIconsistently outperforms SRR in most conditions, achieving lower REby approximately 22.4% compared to LS-SRR. The clear preservationof structural integrity, particularly in the cerebellum, underscores thesuperior performance of our approach. These results highlight therobustness of our method in maintaining anatomical precision, whichis crucial for downstream analyses.
4.1 实验1:基于已知真实标签的猕猴离体磁共振成像验证 我们首先在猕猴离体T2加权磁共振成像(MRI)数据上验证了所提方法,该数据集可提供真实标签(GT),为定量和定性对比提供了可靠依据。图2展示了采用双三次插值、最小二乘超分辨率重建(LS-SRR)及所提ROVER-MRI方法的重建结果,凸显了不同方法间的性能差异。双三次插值法导致小脑精细结构和脑组织边界出现明显模糊,放大区域(黄色方框)中这一现象尤为显著。最小二乘超分辨率重建(LS-SRR)虽提升了图像锐利度,但引入了明显的条纹伪影,影响了重建质量。此外,误差图显示,最小二乘超分辨率重建(LS-SRR)难以有效保留精细结构边界(见图2中红色和绿色方框)。尽管最小二乘超分辨率重建(LS-SRR)的性能优于双三次插值法,但这些伪影和误差限制了其在保留解剖结构准确性方面的效果。 相比之下,ROVER-MRI表现出更优性能,不仅最大限度地减少了残留误差,还能以高保真度有效恢复精细细节。通过对两个黄色方框区域进行拉普拉斯方差定量锐利度评估,结果显示ROVER-MRI的锐利度值(0.0105和0.0123)高于最小二乘超分辨率重建(LS-SRR)(0.0089和0.0104),突显其在保留精细解剖细节方面的卓越能力。 表2汇总了不同磁共振成像重建方法(最小二乘超分辨率重建(LS-SRR)和ROVER-MRI)在多种成像场景下的相对误差(RE)对比结果。数据表明,ROVER-MRI在大多数情况下均优于最小二乘超分辨率重建(LS-SRR),相对误差较后者降低约22.4%。该方法能清晰保留结构完整性(尤其是小脑区域),彰显了其性能优势。这些结果证实了所提方法在维持解剖结构精度方面的稳健性,而这一点对于后续分析至关重要。
Figure
图
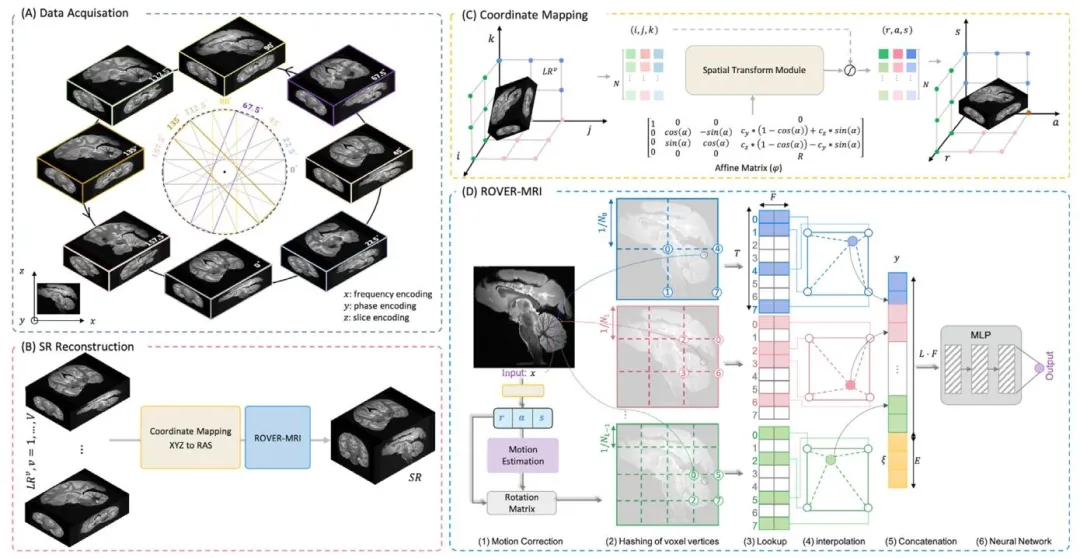
Fig. 1. Overview of the ROVER-MRI framework. (A) Data Acquisition: Eight low-resolution images are acquired with varying slice orientations to ensurecomprehensive spatial coverage. (B) SR Reconstruction: A neural network-based implicit representation maps RAS spatial coordinates to pixel values, enablinghigh-quality super-resolution reconstruction. © Coordinate Mapping: Matrix coordinates from low-resolution images are preprocessed to extract precise imagevalues for reconstruction. (D) ROVER-MRI: Multi-resolution hash encoding integrates spatial mapping, voxel hashing, feature retrieval, and auxiliary inputconcatenation to achieve enhanced reconstruction performance
图 1 ROVER-MRI 框架概述。(A) 数据采集:采集 8 幅不同切片方向的低分辨率图像,确保全面的空间覆盖。(B) 超分辨率重建:基于神经网络的隐式表征将 RAS 空间坐标映射至像素值,实现高质量超分辨率重建。© 坐标映射:对低分辨率图像的矩阵坐标进行预处理,提取精确的图像值用于重建。(D) ROVER-MRI:多分辨率哈希编码整合空间映射、体素哈希、特征检索及辅助输入拼接,以提升重建性能

Fig. 2. Reconstruction results on simulated LR data using Bicubic interpolation, LS-SRR, and ROVER-MRI. The first and third rows show reconstructed sagittalMRIs, while the second and fourth rows present the corresponding error maps calculated against the GT. The red and green boxes highlight zoomed-in regions,which allow a closer inspection of the reconstruction quality
图 2 采用双三次插值、最小二乘超分辨率重建(LS-SRR)及ROVER-MRI对模拟低分辨率(LR)数据的重建结果。第一行和第三行为重建的矢状位磁共振图像(MRI),第二行和第四行为相对于真实标签(GT)计算得到的对应误差图。红色和绿色方框标注的是放大区域,便于细致观察重建质量。

Fig. 3. Reconstruction results of our method and LS-SRR using fewer views. (A) LS-SRR reconstruction results, showing increased error as the view count decreases.(B) ROVER-MRI reconstruction results, demonstrating high-quality reconstruction even with fewer views. Rows 1 and 4 display typical reconstruction results,while Rows 2 and 5 show enlarged views of the regions within the red boxes. Rows 3 and 6 show the error maps for these regions, highlighting the superiorreconstruction accuracy of ROVER-MRI compared to LS-SRR
图 3 本方法与最小二乘超分辨率重建(LS-SRR)在较少视角下的重建结果。(A) LS-SRR重建结果,显示视角数量减少时误差增大。(B) ROVER-MRI重建结果,表明即使在较少视角下仍能实现高质量重建。第1行和第4行展示典型重建结果,第2行和第5行显示红色方框内区域的放大图,第3行和第6行显示这些区域的误差图,突出ROVER-MRI相比LS-SRR具有更优的重建精度。
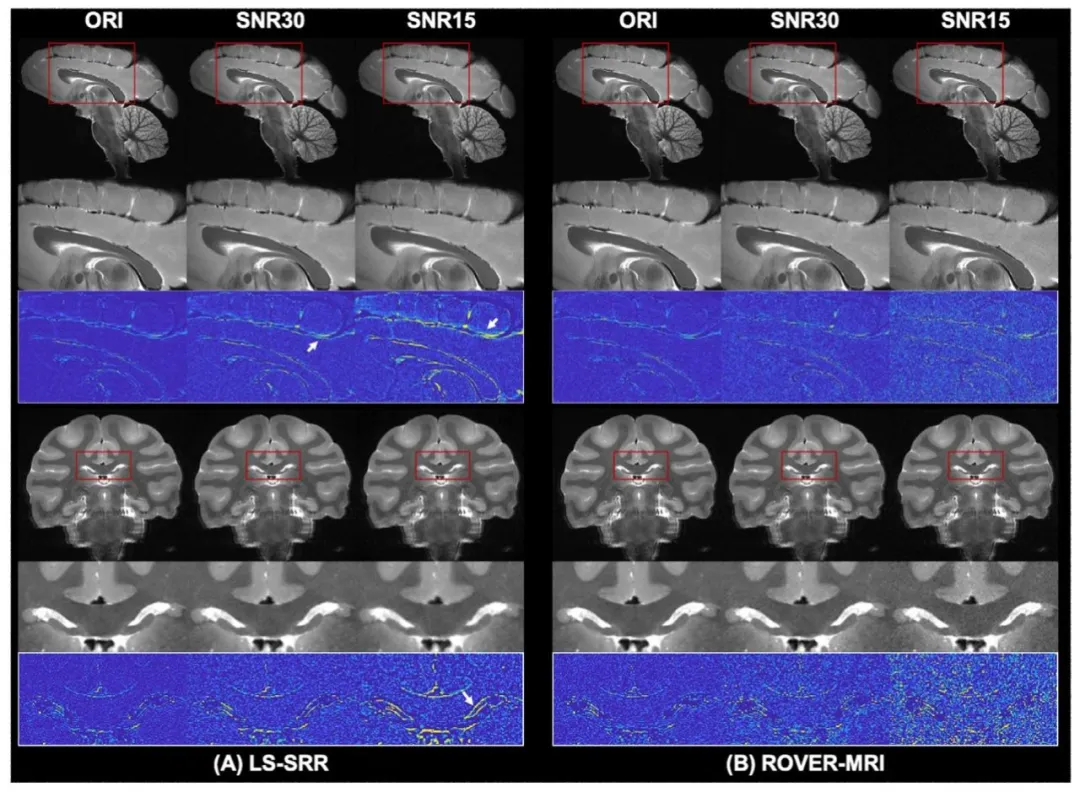
Fig. 4. Reconstruction results of our method and LS-SRR with varying noise levels. (A) LS-SRR results under added noise, where reconstructions at SNR 30 showreduced error compared to SNR 15. (B) ROVER-MRI reconstructs cleaner images with significantly reduced errors compared to LS-SRR at both SNR levels. Rows1 and 4 display typical reconstruction results, while Rows 2 and 5 show enlarged views of the regions within the red boxes. Rows 3 and 6 show the error mapsfor these regions, emphasizing the robustness of ROVER-MRI against noise.
图 4 本方法与最小二乘超分辨率重建(LS-SRR)在不同噪声水平下的重建结果。(A) 添加噪声后的LS-SRR结果,显示信噪比(SNR)为30时的重建误差低于SNR为15时。(B) ROVER-MRI在两种信噪比水平下均能重建出更清晰的图像,且误差较LS-SRR显著降低。第1行和第4行展示典型重建结果,第2行和第5行显示红色方框内区域的放大图,第3行和第6行显示这些区域的误差图,凸显ROVER-MRI的抗噪声鲁棒性。

Fig. 5. SRR results at 180 𝜇 m isotropic resolution. LS-SRR introducesstreaking artifacts, which degrade the image quality. In contrast, our ROVERMRI method demonstrates superior performance, preserving sharper and morecontinuous anatomical structures while achieving improved SNR.
图 5 180微米各向同性分辨率下的超分辨率重建(SRR)结果。最小二乘超分辨率重建(LS-SRR)会产生条纹伪影,导致图像质量下降。相比之下,我们的ROVER-MRI方法表现更优,在保留更锐利、更连续的解剖结构的同时,实现了更高的信噪比(SNR)。
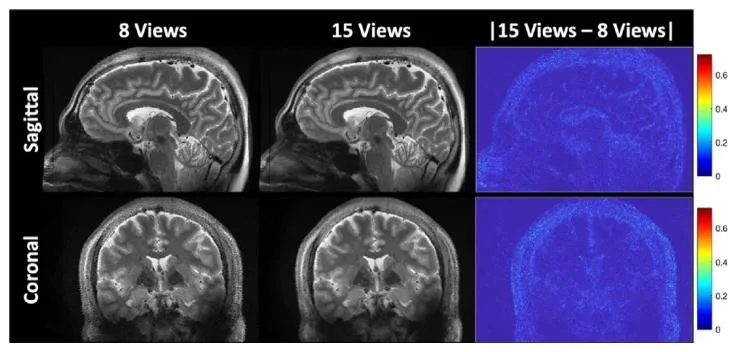
Fig. 6. ROVER-MRI results with reduced number of views. The image reconstructed by 15 views was used as a reference. Difference map in the last columnshows very little loss in structural details.
图 6 减少视角数量后的ROVER-MRI重建结果。以15个视角的重建图像作为参考,最后一列的差异图显示结构细节几乎无损失。
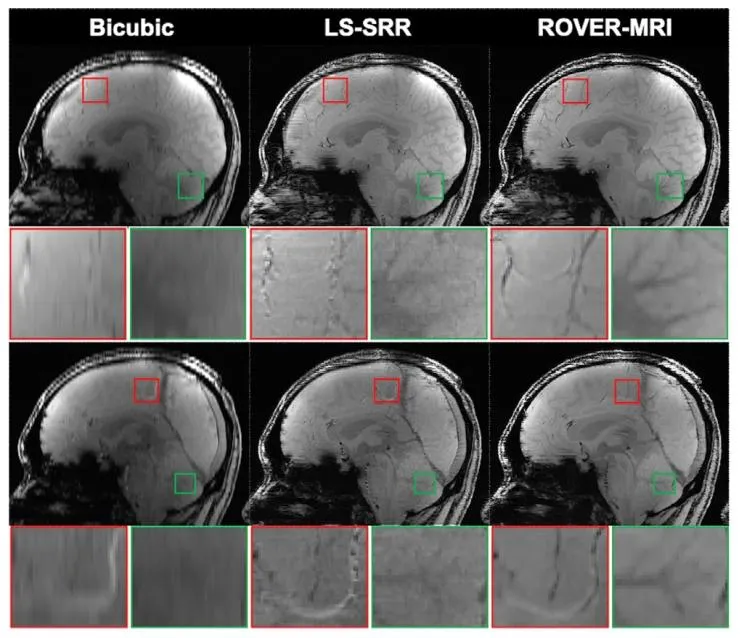
Fig. 7. Sagittal brain 7T T2 MRIs reconstructed using three methods: Bicubic,LS-SRR, and ROVER-MRI. The first and third rows display the reconstructedimages for each method. The second and fourth rows present zoomed-inregions (indicated by red and green boxes) for detailed comparison
图 7 采用三种方法重建的7T矢状位脑部T2加权磁共振图像(MRI):双三次插值、最小二乘超分辨率重建(LS-SRR)及ROVER-MRI。第一行和第三行展示每种方法的重建图像,第二行和第四行呈现放大区域(红色和绿色方框标注),用于详细对比。
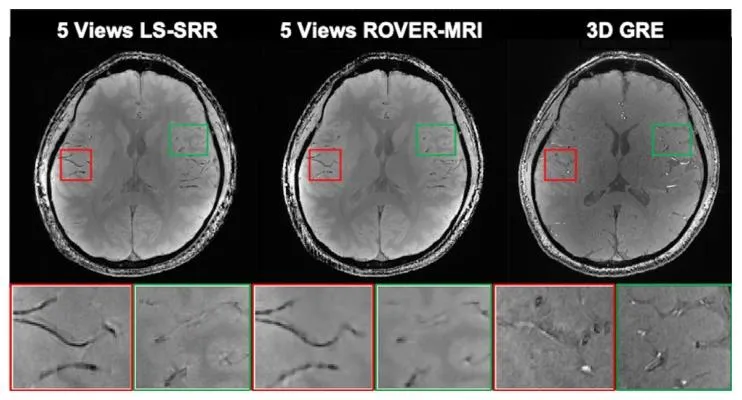
Fig. 8. Comparison of reconstruction results from 5 views with 3D GREacquisition. Both SRR algorithms exhibit finer anatomical details than 3D GRE.
图 8 5个视角的超分辨率重建(SRR)结果与3D梯度回波(GRE)采集结果的对比。两种超分辨率重建算法均展现出比3D梯度回波(GRE)更精细的解剖学细节。

Fig. 9. 3T T2-weighted brain MRI reconstructed using three different methods.The first and third rows show the reconstruction, while the second and fourthrows present zoomed-in views of the regions marked by yellow boxes
图 9 采用三种不同方法重建的3T T2加权脑部磁共振图像(MRI)。第一行和第三行展示重建结果,第二行和第四行呈现黄色方框标注区域的放大视图。
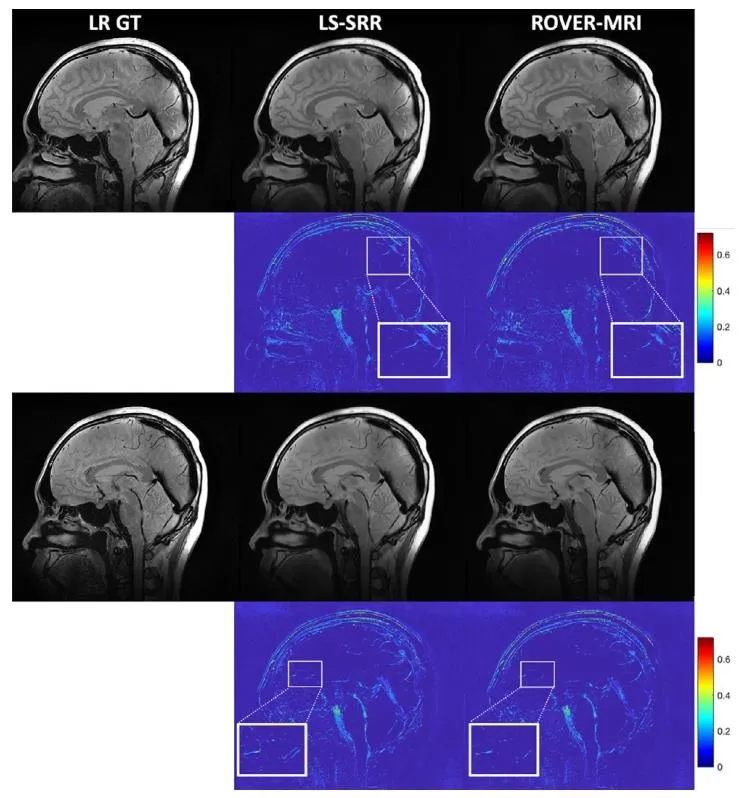
Fig. 10. Sagittal brain MR images back-projected into the low-resolutionspace. The first and third rows display the back-projected images for eachmethod. The second and fourth rows show the error maps calculated againstthe low-resolution ground truth (LR GT). Zoomed-in regions (indicated bywhite boxes) highlight structural details for closer inspection
图 10 反投影至低分辨率空间的矢状位脑部磁共振图像(MRI)。第一行和第三行展示每种方法的反投影图像,第二行和第四行呈现相对于低分辨率真实标签(LR GT)计算得到的误差图。白色方框标注的放大区域突出显示结构细节,便于细致观察。

Fig. 11. Reconstruction results of simulated monkey brain MRI data withmotion (rotations of 5 ◦ , 7 ◦ , and 10◦ applied to three of eight views).Results without motion correction (w/o Moco), with motion-corrected LSSRR (Moco+SRR), and with the proposed motion-corrected ROVER-MRI(Moco+ROVER) are compared against ground truth (GT). The top row displaysreconstructed intensity images, and the bottom row shows correspondingabsolute error maps (brighter regions indicate higher errors)
图 11 含运动的模拟猕猴脑部磁共振成像(MRI)数据重建结果(对8个视角中的3个施加5°、7°和10°的旋转运动)。将无运动校正(w/o Moco)、运动校正后的最小二乘超分辨率重建(Moco+SRR)及所提运动校正ROVER-MRI(Moco+ROVER)的结果与真实标签(GT)进行对比。上排展示重建强度图像,下排展示对应的绝对误差图(亮度越高表示误差越大)。
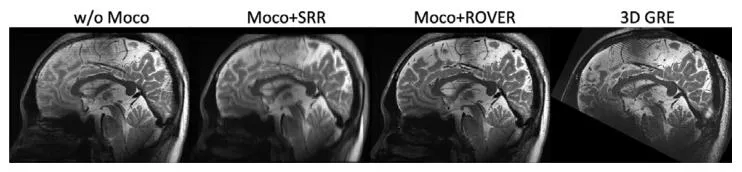
Fig. 12. Comparison of in-vivo human brain reconstruction results acquired at 7T MRI without motion correction (w/o Moco), with motioncorrected LS-SRR (Moco+SRR), and motion-corrected ROVER-MRI reconstruction (Moco+ROVER), benchmarked against a high-quality reference 3Dgradient echo (3D GRE) image
图 12 7T磁共振成像(MRI)采集的人类在体脑部重建结果对比:无运动校正(w/o Moco)、运动校正后的最小二乘超分辨率重建(Moco+SRR)及运动校正ROVER-MRI重建(Moco+ROVER),以高质量参考3D梯度回波(3D GRE)图像为基准进行评估。
Table
表

Table 1Hash encoding parameters: hash table size 𝑇 , number of feature dimensionsper entry 𝐹, the coarsest resolution 𝑁𝑚𝑖𝑛 and the regularization parameter 𝜆𝑐were set based on the spatial resolution and SNR of the images
表 1 哈希编码参数:哈希表大小(T)、每个条目的特征维度(F)、最低分辨率(N_{\text{min}})及正则化参数(\lambda_c),均根据图像的空间分辨率和信噪比(SNR)进行设置。

Table 2Relative Error (RE) values reflect the errors between the low-resolution groundtruth (GT) images and the low-resolution images obtained by back-projectingthe reconstructed images from different methods.
表 2 相对误差(RE)值反映了低分辨率真实标签(GT)图像与不同方法重建图像反投影得到的低分辨率图像之间的误差。